With the deep integration of Industry 4.0 and artificial intelligence technology, robotic arms are rapidly evolving from traditional repetitive handling tools towards intelligence, precision, and flexibility. In this evolution process, hybrid stepper motors are gradually becoming the core driving components for precision motion control of robotic arms due to their excellent performance – high-precision positioning, high torque output, and compact shape. This article will delve into the working principle, core advantages, specific application scenarios, and selection points of hybrid stepper motors in robotic arms.
What is a hybrid stepper motor
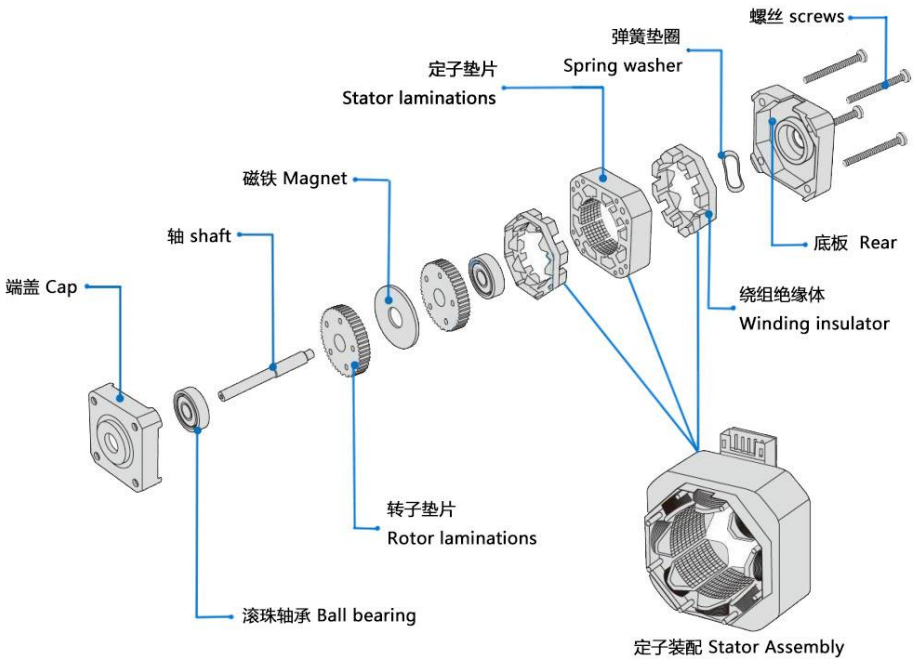
Hybrid stepper motor is a type of stepper motor designed by combining the advantages of permanent magnet and reactive stepper motors. It combines the design principles of variable reluctance motors and permanent magnet motors – the rotor is made of permanent magnet materials (such as neodymium iron boron) and has slots on the rotor core, while the stator is equipped with multi-phase windings and slots, thus achieving high step precision, large output torque, and good dynamic response performance. Structurally speaking, the HB type hybrid stepper motor has two magnetic disks sandwiching a permanent magnet cylinder. The outer teeth of the two disks have the same pitch and are installed with teeth offset by 1/2 of the pitch. The rotor cylinder permanent magnet is magnetized axially.
The core technological advantages of hybrid stepper motors

High precision and high resolution
Compared to permanent magnet stepper motors, hybrid stepper motors have higher step accuracy, faster operating speed, and greater torque. The step angle is usually between 3.6 ° and 0.9 °, with a step angle of 0.9 ° achieving 400 steps per revolution. Using micro stepping technology, each step can be subdivided into up to 256 micro steps, achieving sub second level precision positioning. The accuracy during stopping can reach ± 3 arc minutes or ± 0.05 °, making it very suitable for positioning applications without encoder feedback. These characteristics make hybrid stepper motors particularly suitable for scenarios in robotic arms that require extremely high precision.
Compact structure and high torque density
The hybrid stepper motor achieves high torque density within a compact shape. By integrating position sensors (such as encoders), hybrid stepper motors with position feedback combine the structural simplicity of stepper motors with the real-time control advantages of servo systems, making them particularly suitable for integration into confined spaces such as robot wrists, facial expression drive modules, or spinal joints. The compact design of hybrid stepper motors provides ample integrated degrees of freedom for the multi joint structure of robotic arms.
Closed loop control and adaptive capability
The hybrid stepper motor achieves closed-loop control through the integration of position sensors. The system can detect and correct step loss or unexpected resistance, reduce positioning errors, and even provide smoother motion in dynamic environments. For example, if the robot’s arm encounters resistance when extending, the open-loop system may continue to attempt to apply force, which may damage the mechanism; Hybrid motors with feedback can identify anomalies, pause, or adjust output accordingly. This adaptive ability is crucial for safety, reliability, and natural motion in service robots and collaborative factory robots. Compared to full servo systems, hybrid stepper motors have a cost advantage and significantly improve the performance of open-loop stepper motors.
Energy saving and low heat generation
The hybrid stepper motor controls the current according to the load rate, which can reduce the standby current by 90% and lower the surface temperature to about 37 ℃. This means that hybrid stepper motors that dynamically adjust current consumption based on load status, reduce waste heat, and improve battery life are of great significance for battery powered mobile robotic arms and collaborative robots. Meanwhile, the closed-loop controlled hybrid stepper motor can achieve smaller motor size under the same output torque, further compressing the joint volume of the robotic arm.
Reliability and Long Lifespan
The hybrid stepper motor adopts a brushless design, with a simple structure and few fault points, and can adapt to complex environments such as temperature changes and vibrations. Combined with battery maintenance free absolute encoder technology, there is no need for external reference sensors, ensuring system accuracy and efficiency while maintaining a compact design. These features make it particularly suitable for industrial scenarios that require long-term continuous operation.
Post time: Jun-01-2026