




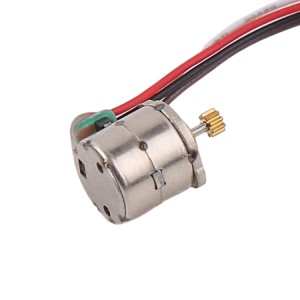
High Torque Micro 35mm stepper motor for printer
Description
There are two winding methods for stepper motors: bipolar and unipolar.
1.Bipolar Motors
Our bipolar motors generally have only two phases, phase A and phase B, and each phase has two outgoing wires, which are separate winding. There is no connection between the two phases. Bipolar motors have 4 outgoing wires.
2.Unipolar motors
Our unipolar motors generally have four phases. On the basis of two phases of bipolar motors, two common lines are added.
If common wires are connected together, the outgoing wires are 5 wires.
If common wires are not connected together, the outgoing wires are 6 wires.
An unipolar motor has 5 or 6 outgoing lines.
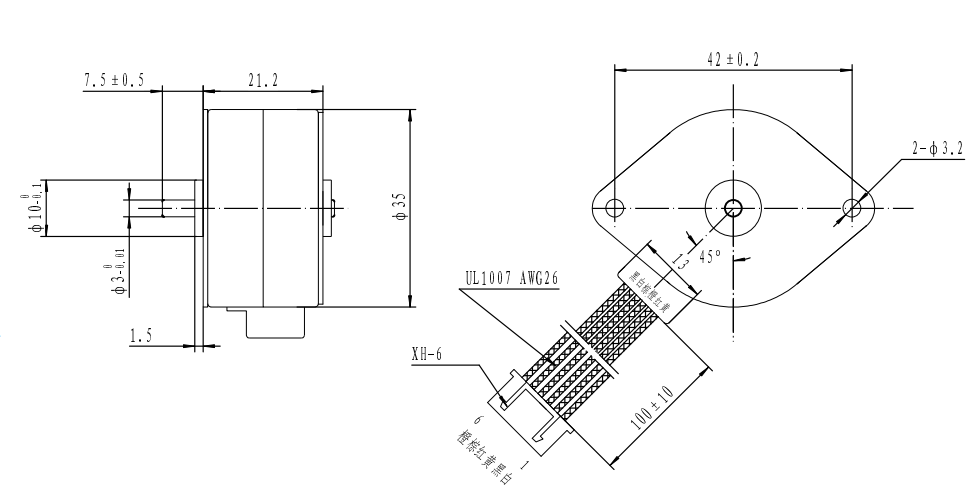
Parameters
| Voltage | 8DV DC |
| No.of Phase | 4 Phase |
| Step Angle | 7.5°±7% |
| Winding Resistance(25℃) | 16Ω±10% |
| Current phase | 0.5A |
| Detent torque | ≤110g.cm |
| Max Pull-in Rate | 400PPS |
| Holding Torque | 450g.cm |
| Winding temperature | ≤85K |
| Didlectric Strength | 600 VAC 1SEC 1mA |
Design Drawing
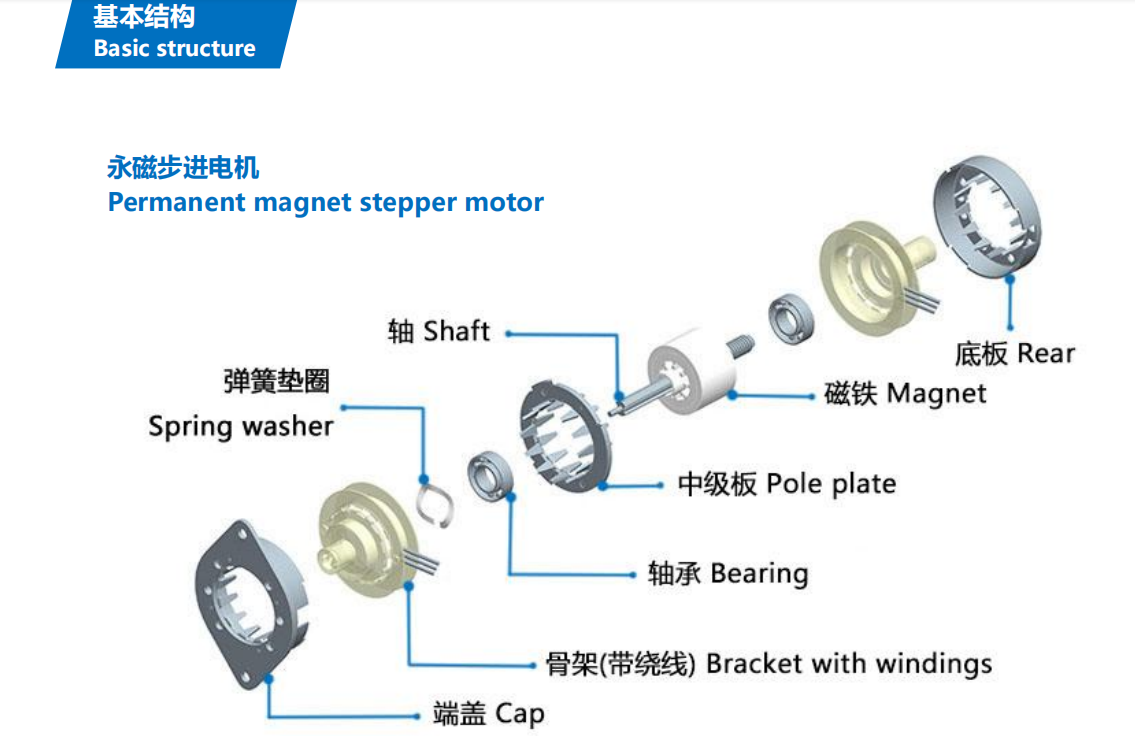
About the basic structure of PM stepper motor
Features & Advantage
1. High precision positioning
Since steppers move in precise repeatable steps, they excel in applications requiring precise
positioning, by the number of steps the motor moves
2. High Precision speed control
Precise increments of movement also allow for excellent control of rotational speed for process
automation and robotics. The rotational speed is determined by the frequency of the pulses.
3. Pause and holding function
With control of the drive, the motor has lock function (there is current through motor windings, but
the motor does not rotate), and there is still a holding torque output.
4. Long life & low electromagnetic interference
The stepper motor has no brushes, and does not need to be commutated by brushes like a brushed
DC motor. There is no friction of the brushes, which increases the service life, has no electric sparks, and reduces electromagnetic interference.
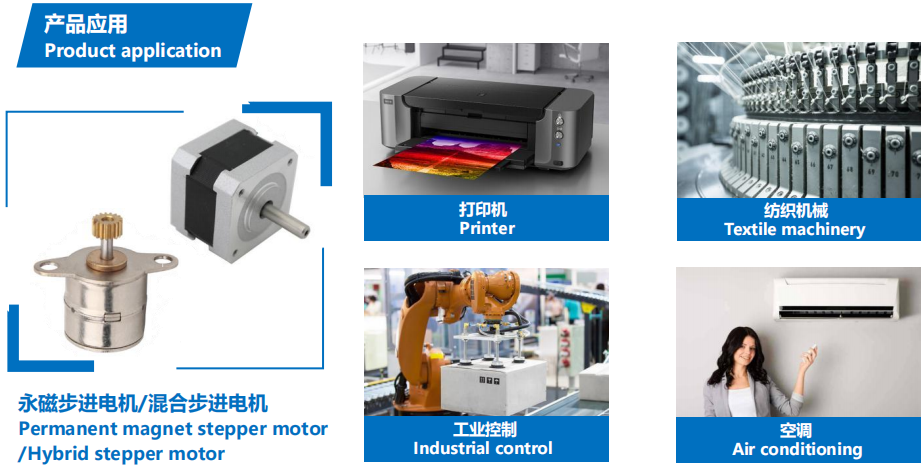
Application of PM stepper motor
Printer
Textile machinery
Industrial control
Air conditioning
Working principle of stepper motor
The drive of the stepper motor is controlled by software. When the motor needs to rotate, drive will
apply the stepper motor pulses. These pulses energize stepper motor's in a specified order, thereby
causing the motor's rotor to rotate in a specified direction (clockwise or counter clockwise). So as to
realize proper rotation of the motor. Each time the motor receives a pulse from the driver, it will rotate by a step angle (with full-step drive), and the rotation angle of the motor is determined by the number of driven pulses and step angle.
Lead time and packaging information
Lead time for samples:
Standard motors in stock: within 3 days
Standard motors not in stock: within 15 days
Customized products: About 25~30 days (based on complexity of customization)
Lead time for building a new mold: generally about 45 days
Lead time for mass production: based on order quantity
Packaging:
Samples are packed in foam sponge with a paper box, shipped by express
Mass production, motors are packed in corrugated cartons with transparent film outside. (shipping by air)
If shipped by sea, product will be packed on pallets

Payment method and payment terms
For samples, in general we accept Paypal or alibaba.
For mass production, we accept T/T payment.
For samples, we collect full payment before production.
For mass production, we can accept 50% pre-payment before production, and collect the rest 50% payment before shipment.
After we cooperate order more than 6 times, we could negotiate other payment terms such as A/S (after sight)
Send your message to us:
Products categories
-

low noise high quality 3.3V 6mm micro stepper m...
-

10BY mini 5v 10mm diameter micro stepper motor ...
-

15by micro steppr motor 2-phase 4-wire 18 degre...
-

20 mm Micro stepper motor can be matched with g...
-

20mm permanent magnet 12Vmicro stepper motor fo...
-
8mm Mini Micro Stepper Motor 2 phase 18 degree ...